Los autores de este trabajo, con sede en el Instituto de Tecnología de Georgia, Atlanta; la Universidad de California en Berkeley, en Berkeley y la Universidad Northwestern, en Evanston
Pasos ligeros y pies grandes pueden permitir a los animales y los robots mantener altas velocidades en superficies de tierra muy suelta y arenosa.
Estos resultados, que se publican en ‘Bioinspiration and Biomechanics’, ofrecen una nueva visión de cómo los animales responden a diferentes terrenos y cómo los robots pueden aprender de ellos.
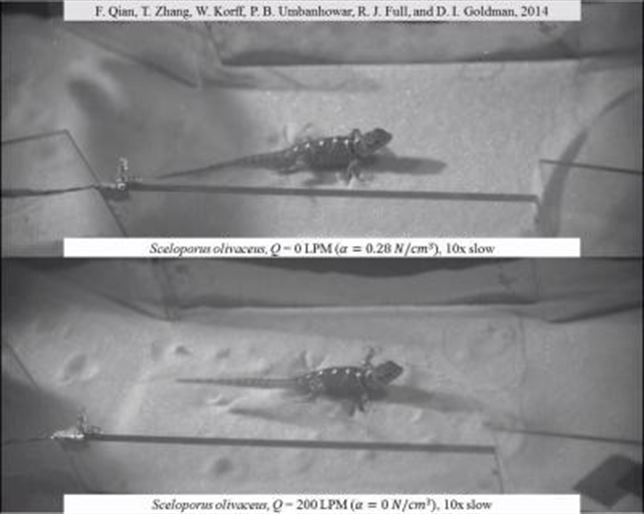
Los autores de este trabajo, con sede en el Instituto de Tecnología de Georgia, Atlanta; la Universidad de California en Berkeley, en Berkeley y la Universidad Northwestern, en Evanston, todas en Estados Unidos, desarrollaron un banco de pruebas para analizar el rendimiento de diferentes animales y un robot hexapedal sobre suelo arenoso. «Si podemos averiguar cómo resuelven el problema los animales, podemos fabricar mejores robots», afirma el autor del artículo, Daniel Goldman.
«Fue como desarrollar el equivalente terrestre de un túnel de viento en términos de estudiar el movimiento sobre diferentes terrenos -apunta Goldman continuó–. Nos permite fijarnos en el movimiento a través de la tierra en una variedad de estados altamente controlados y realmente ver cómo los animales se ajustan a los diferentes tipos de terreno».
En este trabajo, se estudiaron cinco animales elegidos para reflejar diferentes hábitats nativos, esquemas de cuerpos y estilos de movimientos rápidos a través de tierra suelta. «Queríamos tener un rango de especialidades, agrega Goldman. Tenemos animales que corren en la arena, pero también otros que van por superficies muy diferentes, a través de arena, bosques y árboles».
Los investigadores también utilizaron un robot de seis patas y una simulación por ordenador del robot para modelar aspectos de la locomoción. Estos primeros principios, ‘robofísicos’, una aproximación para entender el movimiento, serán claves para el diseño robótico, según Goldman. «Los pioneros del vuelo observaron diferentes diseños de alas en un túnel de viento y ahora podemos hacer esto con un diseño robótico», subraya.
«Nos encantaría poder explorar, por ejemplo Marte, muy rápido, pero los robots que tenemos son relativamente pesados y lentos -añade–. Uno de los principales problemas es que se bloquean por cambios en el terreno por el que se están moviendo. Estos resultados ofrecen una visión hacia la que desarrollar las cosas en el futuro».
Los investigadores del grupo de Goldman en Georgia Tech están ahora investigando cómo animales como lagartos y serpientes se mueven sobre la tierra con heterogeneidades, como cantos rodados.
ep



