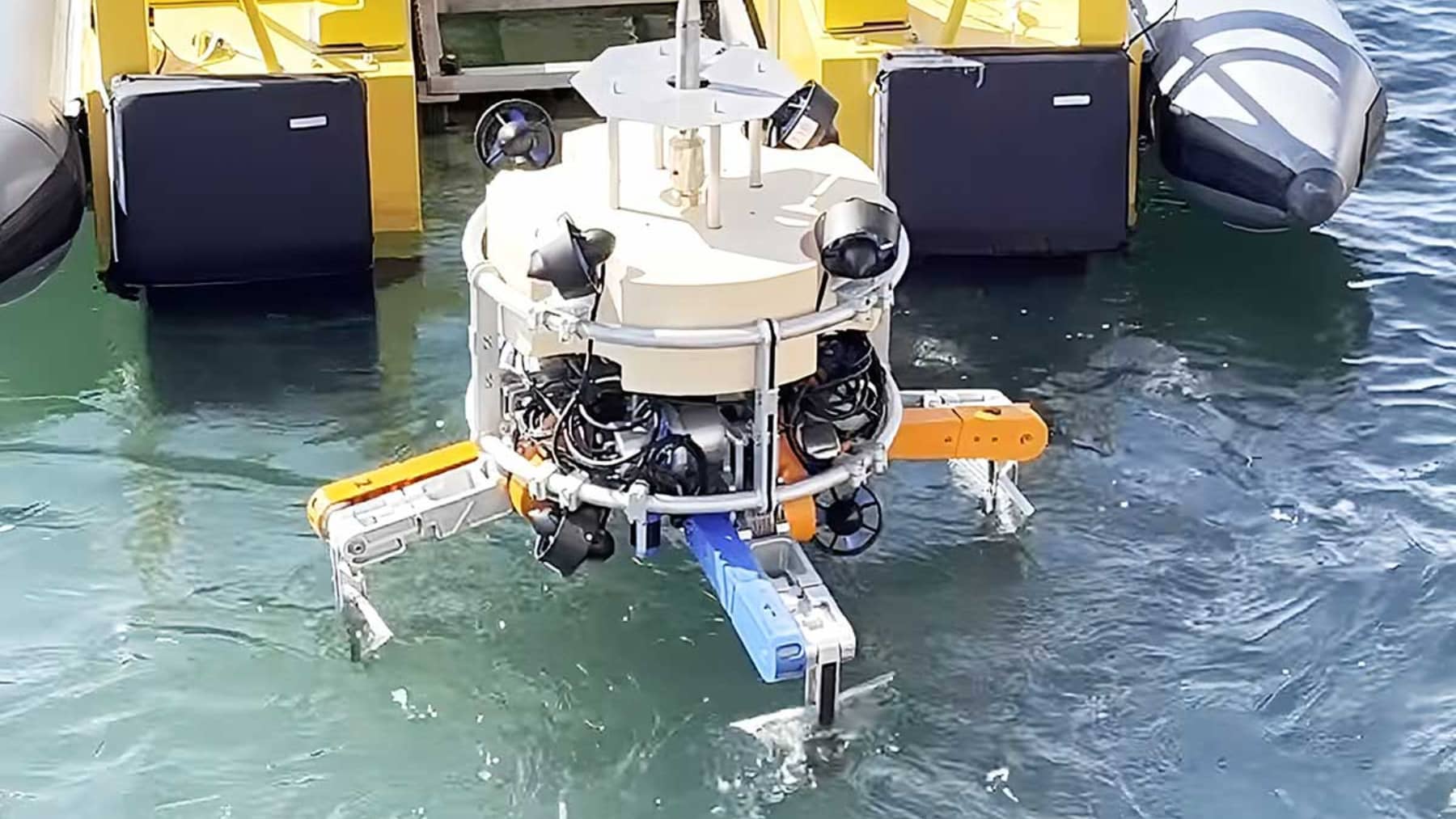
Europa ha puesto en el agua una pieza de tecnología con vocación de servicio público. Un robot submarino de aspecto “arácnido”, desarrollado por la Universidad Técnica de Múnich (TUM) dentro del proyecto SeaClear2.0, se ha probado en el entorno del puerto de Marsella con un objetivo claro, retirar basura del fondo marino de forma más segura y precisa que las operaciones tradicionales. La escena interesa especialmente a España, donde la presión sobre playas, dársenas y fondos portuarios se convierte cada año en un problema ambiental y también económico, por el impacto sobre la biodiversidad, el turismo y el mantenimiento de infraestructuras costeras.
El punto de partida es incómodo y cuantificable. La contaminación plástica no solo flota, también se acumula en el fondo. Un estudio científico estima que entre 3 y 11 millones de toneladas métricas de plástico residen en el lecho oceánico, con concentraciones relevantes cerca de los continentes. En ese contexto, la retirada de objetos como redes, neumáticos o chatarra deja de ser un gesto simbólico y se convierte en una tarea de gestión ambiental de largo recorrido.
Cómo funciona el sistema
SeaClear2.0 no es un único robot, sino un “equipo” coordinado. El planteamiento combina una embarcación no tripulada, un dron aéreo y varios vehículos marinos capaces de localizar, clasificar y recuperar residuos en entornos portuarios y zonas de difícil acceso. La Comisión Europea, a través de CORDIS, ha descrito el enfoque como un sistema colaborativo que opera desde el aire, la superficie y bajo el agua, apoyado en técnicas de aprendizaje automático para identificar y cartografiar basura antes de retirarla.
El objetivo práctico es sustituir o reducir la exposición de los buzos en operaciones complejas, especialmente cuando se trabaja con visibilidad limitada, corrientes o profundidad. Además, el sistema está diseñado para intervenir donde la basura no es visible desde superficie y donde, con un temporal, puede volver a moverse hacia zonas de baño o espacios naturales sensibles.
Un robot con precisión y fuerza controlada
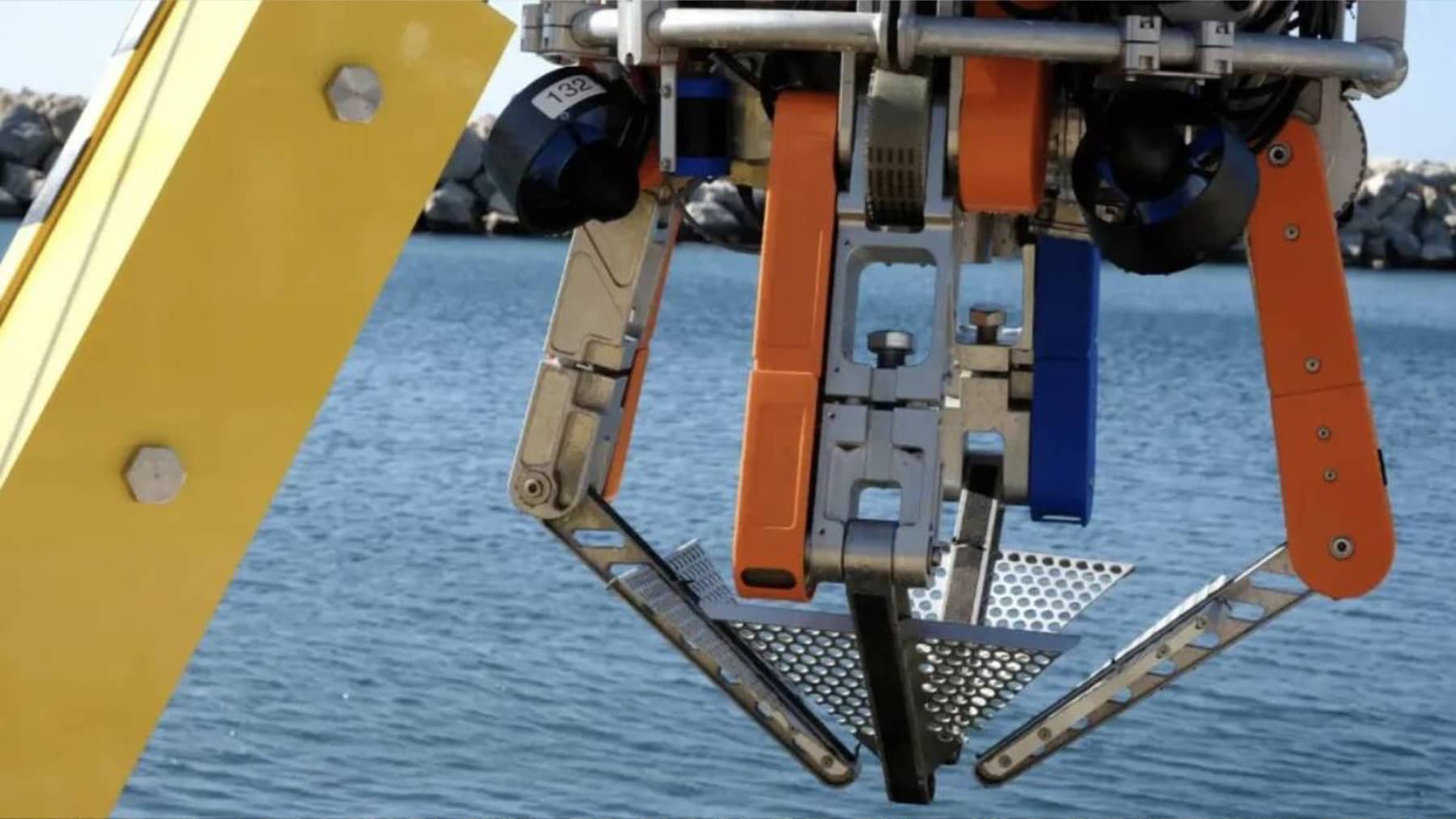
La pieza más llamativa es el robot submarino de TUM, equipado con un sistema de agarre autónomo pensado para combinar potencia y delicadeza. Según la universidad, su pinza de cuatro “dedos” puede aplicar hasta 4.000 newtons y manipular objetos de hasta 250 kilos, con sensores que regulan la fuerza para evitar roturas en materiales frágiles.
La diferencia respecto a una grúa tradicional no está solo en la fuerza, sino en la decisión. La misma fuente explica que, tras identificar el residuo, la inteligencia artificial genera una representación en 3D para elegir el punto de agarre más seguro. En palabras del investigador Stefan Sosnowski, “esto es importante para decidir dónde se puede agarrar el objeto con seguridad”.
Este matiz importa en un puerto real. Una red enredada, una pieza metálica irregular o una bolsa atrapada entre rocas no se comportan igual cuando se tiran hacia arriba. Minimizar golpes y roturas reduce, a su vez, la dispersión de fragmentos y el riesgo de liberar microplásticos durante la propia operación.
Pruebas en Marsella y qué significa para España
La demostración pública del sistema en Marsella se celebró el 16 de septiembre de 2025 y reunió a socios tecnológicos y académicos para exhibir capacidades de detección y retirada en un entorno operativo. La elección del puerto no es casual. Las dársenas concentran actividad humana, corrientes internas y puntos de acumulación donde la basura puede permanecer años.
Para España, la relevancia es doble. Primero, porque buena parte del problema se manifiesta en puertos y zonas urbanas costeras, justo donde este tipo de robots tiene más sentido. Segundo, porque el debate ya no es solo “limpiar”, sino integrar la retirada con prevención y vigilancia. Ahí encaja un enfoque que, además de recuperar residuos, genera datos sobre qué aparece, dónde y con qué frecuencia, un insumo útil para políticas locales y para la gestión portuaria.
La tecnología, sin embargo, llega con preguntas abiertas. Ni TUM ni el proyecto detallan todavía un calendario de despliegue comercial generalizado en puertos españoles, ni el coste por operación en condiciones estándar. Es el típico tramo entre el éxito de una demostración y la adopción sostenida, que suele depender de financiación, contratación pública, mantenimiento y protocolos de seguridad.
A tener en cuenta
La robótica ayuda, pero no sustituye la prevención. Distintos proyectos insisten en que el flujo hacia el mar nace a menudo en tierra, por escorrentías, alcantarillado y mala gestión de residuos. En España, iniciativas como Proyecto LIBERA han insistido en esa lógica de “basuraleza” que termina en el litoral si no se corta el origen.
Al mismo tiempo, ya existen experiencias de retirada y monitorización en costas españolas, con campañas y programas que trabajan en fondos marinos y puertos. Upcycling the Oceans y Mares Circulares, por ejemplo, han documentado actuaciones de recogida de basura en fondos marinos, con participación de actores locales. La entrada de sistemas como SeaClear2.0 puede reforzar ese ecosistema, especialmente donde los riesgos y los costes de buceo se disparan.



